|
|
||
|
深入地下
|
||
|
Tony Reichhardt 文 Shea 译
|
||
|
新一代的行星雷达将会深入地下,探寻太阳系最耐人寻味的秘密。 不可否认,尽管火星表面的照片非常漂亮,但是要由此揭示出隐藏在蜿蜒的河床和峡谷背后的秘密却不是意见容易的事情。空间探测器和火星车已经发现了大量火星表面曾经有水的证据,但是今天的火星表面却是完全干涸的。在火星的两极存在水冰,预示在赤道附近可能存在一片封冻的海洋——但是任何大型储水地可能都在地下几千米处,因为那里的温度比较高。因此寻找有可能承载火星生命的液态水必须深入地下。 在未来的几个月中,欧洲“火星快车”探测器(Mars Express)上的火星地下和电离层探测高新雷达(Mars Advanced Radar for Subsurface and Ionospheric Sounding,MARSIS)将会为我们提供期待已久的答案。如果它能如期工作,那么它就会成为一根插入火星的探针,并且还会为将来的雷达计划铺平道路。 就像对地球的探测,结果可以会模棱两可,MARSIS也可能会一无所获。但是就目前而言,如果它能工作,那么这个项目的科学家就非常高兴了。 2004年4月,在考虑到释放雷达天线20米长的玻璃纤维吊杆之后可能会砸到探测器,MARSIS小组不得不推迟启动这部雷达,它是“火星快车”上7台仪器中最后启动的一台。一个由建造这部雷达的来自意大利空间局和美国喷气推进实验室的专家组成的小组通过计算机模拟和地面实验评估了有关的风险。欧洲空间局(ESA)在5月份的早些时候进行了部署,但是第一根吊杆没有如期展开又导致了进一步的分析和推迟。同时,这也使得雷达错过了最佳的观测时机。罗马La Sapienza大学的MARSIS科学家罗伯托·苏(Roberto Seu)承认:“这是非常非常令人沮丧的。” 黄金时期 当“火星快车”轨道变化时,火星的光照和电离层情况也在变化,而长期的等待使得MARSIS错过了今年最佳的观测窗口。MARSIS的两位首席科学家之一、喷气推进实验室的杰夫·普洛特(Jeff Plaut)说:“我们非常渴望能启动这台设备。”雷达科学家希望“火星快车”能够延长其原先为期两年的工作计划,这样能使得实验继续到明年。 同时,NASA的搭载有浅层地下雷达(Shallow Subsurface Radar,SHARAD)的火星勘探探测器(Mars Reconnaissance Orbiter)已经准备好于8月发射。如果这些实验被证明是成功的,那么雷达将会被装载到火星车上用于火星表面的探测,也可能会被用来研究有冰层覆盖的木卫二或者是小行星的内部。 诸如MARSIS和SHARAD的探测雷达通过从轨道上向行星表面发射雷达脉冲并且分析返回的信号工作。取决于脉冲的频率和物质的特性,雷达信号可以深入到地表以下一定的深度。通常来说,雷达的频率越低可探测的深度就越大。水冰对于雷达来说是非常透明的。干燥的土壤也是,不过这还取决于它的电导率和多孔性。而液态水则能非常有效地反射雷达波。通过一些方法测量雷达回波的能量、散射情况以及在地下不同区域传播的速度可以绘制出一幅地下草图。 如果一切正常,MARSIS将于今年开始观测火星的北半球。MARSIS的低频率(1.3-5.5MHz)原则上可以使它深入地下5千米。但是如此低的频率会导致较低的分辨率——水平分辨率为5-10千米,垂直分辨率大约为100米。任何地下水储地小于这一尺度都无法被发现。 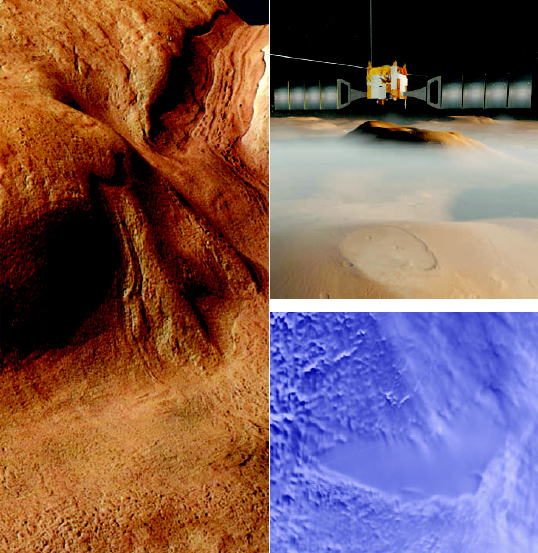 [图片说明]:“火星快车”(右上图)上的雷达将会深入火星的地下(左图),期望发现类似南极佛斯托克湖的地下储水地。 SHARAD具有更高的带宽和工作频率(15-25MHz),这意味着它无法像MARSIS一样深入地下(它大约只能深入1千米),但是它具有更高的分辨率——水平分辨率小到300米,垂直分辨率可以达到15米。火星奥德赛探测器(Mars Odyssey)的数据显示在火星的浅层中可能存在水,有可能会被SHARAD探测到。 广谱 在地球上,地质学家、工程师和考古学家使用便携式地基探测雷达阵来寻找矿藏和被掩埋的文物。架设在飞机上的雷达也被用来探测广茂的冰原地区。1996年通过这一手段证实了在南极冰盖下方4千米处存在一个10000平方公里的湖,被命名为佛斯托克湖(Lake Vostok)。 另外,高频雷达还被用来探测那些被云层覆盖的天体,例如金星和土卫六。在普通望远镜中无法看到它们的表面,但是这些雷达却能毫无遮掩的看到。除了地球之外,目前唯一一个被深度探测雷达探测过的天体就是月球——1972年“阿波罗”17号搭载了一个雷达天线,它可以深入到干燥的月球尘埃之下超过1千米的地方。 华盛顿大学地球物理学家、曾经参与“阿波罗”雷达实验的容格·菲利浦斯(Roger Phillips)回忆说,解释得到的观测数据是个恶梦。“我们当时非常的幼稚,”他说。雷达数据充满了来自表面结构的和地下岩层的回波,真正的地下结构会淹没在噪声中。直到使用了从轨道上拍摄的月球表面立体图像之后,菲利浦斯的小组才从雷达数据中剔除了回波。几年之后,他们才有足够的信心公布他们的发现,他们尝试性地认证出了1千米之下的一些结构。 同时也领导着SHARAD建造小组的菲利浦斯说,去除混乱的雷达回波对于火星探测也是一个问题。但是现在我们对火星地形的了解程度远远大于1972年时我们对月球地形的了解程度。通过使用来自NASA火星激光测高探测器(Mars Orbiter Laser Altimeter)的高度数据和来自“火星快车”高分辨率相机的立体照片——再加上33年来计算机能力的提高——我们可以预先建立起火星表面结构雷达噪声的模型。 但是我们还不知道在实际情况下MARSIS和SHARAD的工作状态会有多好。在地球上,地质学家在使用探测雷达之前会通过地面岩层和矿物来调查地下的岩石。但是火星雷达将探测那些未曾被触及过的土地。这使得这些深入火星地壳的探测变得不可预测。一些金属含量高的矿物会有效地反射雷达波,这有可能会妨碍探测处于深层的水。 目前的模型显示液态水存在火星表面以下2-6千米处,但是水的雷达信号并不是唯一的,其他导电的矿物,包括特定的粘土和金属都有可能会被误认为是地下水。 菲利浦斯相信寻找水是相当困难的。但是这并不是MARSIS的唯一目的。例如,如果能获得地下清晰的图像的话,那么探测火星北极的极冠对于行星科学家来说也是非常有价值的。 内部设计 史密松地球和行星研究中心的行星地质学家约翰·格兰特(John Grant)认为,MARSIS只能用于某些研究。他希望未来能够在火星上放置一个小型可移动的地基探测雷达,并且他已经将这一方案提交到了下一个火星车计划“火星科学实验室”(Mars Science Laboratory)项目中了。尽管这并不是最好的方案,但是MARSIS的成功将会在下一个机会来临时增加它成功的可能性。 格兰特提议的地基探测雷达具有非常高的分辨率(0.1米左右),探测深度10-20米。被安装在火星车上之后,在每个火星车停下来的地方,它都能向地下发射高速雷达脉冲。最终它会绘制出一张脚下的地图。如果需要钻探获得火星地表附近的水冰的话,那么就像很多人认为的那样,雷达讲帮助未来的探测寻找最佳的场所。 木卫二也进入了雷达探测阵营的视线。对行星科学家而言,木卫二是一个吸引人的目标,因为它的海洋层就位于冰层的下面。但是,任何被建造用来深入厚实冰层的雷达都必须工作在木星的强辐射环境下。 更为前卫的想法是由加州大学圣克鲁兹分校由埃瑞克·阿斯方(Erik Asphaug)所领导的一个小组提出来的,用雷达探测小行星的内部。在NASA中尺度行星计划的最后竞争中这个项目落选了,但是很有可能会被再次提出。地面上的雷达已经被用来观测小行星。“深层内部”探测器(Deep Interior)将使用一部探测雷达在环绕小行星的近距离轨道上获得小行星的三维图像。结合“深度撞击”探测器(Deep Impact)的数据,它将提供关于小行星有史以来最完整的认识。 尽管有这些诱人的前景,探测雷达在行星科学家中仍然缺乏重视。这是一项非常复杂的技术,而且解释这些数据也非常非常需要智慧。苏承认:“大多数行星科学家不相信雷达数据。”但是MARSIS的科学家希望他们的实验能够很快改变这一切,而他们所需要的全部就是另一个佛斯托克湖。 |
||
|
出自:Nature
发布日期:2005-05-19
|
||
2001-2009 火流星工作组制作

本文遵循“创作共用约定”之“署名-非商业性使用-禁止演绎”3.0约定
任何意见和建议请致电: