自适应光学时代的到来
著:
Govert Schilling
译:
Shea
1999年11月26日,星期五,在夏威夷的火山附近,斯科特・阿克顿(Scott Acton)目睹了一次火山爆发。你也许会想,这有什么了不起的。但是,这次火山爆发发生在另一个星球上,距地球6亿2千万公里。这次火山爆发光芒的大小就像是两公里外看这句话末尾的句号那样小。而且最不寻常的是,这次观测是在有卷云的情况下进行的。
欢迎来到自适应光学的世界。在多年的憧憬和发展之后,在世界上许多的大天文台里,自适应光学正主导着地基天文学的革命。在那里,新技术战胜了由来已久的问题――大气湍流会使望远镜成的像变得模糊,这被天文学家称为视宁度。通过使用复杂的波前探测器、高速计算机以及在1秒钟内能数百次改变自己外形的“弹性镜面”,天文学家可以消除星光的闪烁――就好像没有大气的存在。
从20世纪90年代早期开始,许多4米级的望远镜已装备了自适应光学系统。在过去的3年里,许多大望远镜也加入了这一行列,包括两架10米的凯克望远镜,8.2米的北双子星座反射望远镜,8.3米的昴星团望远镜,它们都坐落在夏威夷的莫纳亚克。不久,自适应光学将成为全世界大天文台所广泛使用的技术。同时,光学工程师也正在拓展自适应光学,使它们能在更多的情况下被应用,并且能够进一步加大自适应光学系统的视场。幸运的是,这些曾经一度被认为是不可能的事物,最终将会为新一代25-100米的地基望远镜开辟出新的道路。
阿克顿是凯克自适应光学小组的成员之一。自从1999年2月5日凯克Ⅱ望远镜的自适应光学系统首次使用以来,天文学家已经用它来研究了许多天体,显示出了自适应光学系统的巨大潜力。在当年的11月26日,史林尼万斯・库尔卡尼(Shrinivas Kulkarni)(加州理工大学)打算观测褐矮星Gliese 569,但是莫纳亚克上空的卷云使得他无法完成这项计划。“史林尼万斯决定和一个同事去喝杯咖啡,”阿克顿说,当时阿克顿也在凯克Ⅱ的圆顶里协助自适应光学系统的观测工作,“我们想还有什么值得一看呢?”木星是少数几个能透过云层看见的明亮天体,因此阿克顿将巨大的望远镜对准了木星的卫星――木卫一。“我们将自适应光学系统锁定在木卫一上,”他说,“突然之间,木卫一显示出了火山活动的迹象!通过三张近红外的照片,我们制作了一张木卫一的伪色彩照片,它展示了其表面的丰富细节。”其中每一斑点相当于150公里的区域。对于阿克顿来说,糟糕的观测夜创造出了奇迹。
历史背景
大约在4百年前,当伽利略用他的望远镜首次发现木星的卫星时,他几乎不可能想到他小望远镜的后裔,这架重达300吨的望远镜居然可以分辨出木星卫星表面的细节。伽利略手工制造的望远镜的口径只有4.4厘米,而且透镜的质量很差,无法分辨小于10角秒的细节――相当于300米外一枚银币所张开的角。因此,伽利略无法分辨出土星的光环。
如果伽利略望远镜的透镜的质量十分好的话,它的分辨率可以达到3角秒――4.4厘米透镜的理论分辨率。一架望远镜的分辨率反比于它的口径,因此一架13厘米的望远镜的分辨率是1角秒,而130厘米的则为0.1角秒。这就是为什么10米的凯克望远镜理应能看清木卫一细节的原因。如此大的口径,望远镜的分辨率应该达到0.0013角秒。
如果凯克望远镜在地球轨道或是月球轨道上,那么这是可能的。但是正如许多望远镜使用者所知道的,地球大气会严重影响高放大倍率下所成的像。大气湍流会是影像变得模糊,因此,无论口径有多大,没有望远镜的分辨率可以达到0.5角秒以下,甚至在山顶这种视宁度极好的地方也是如此。从分辨率的角度来说,世界上最大的望远镜不比爱好者手中的10英寸望远镜好到哪儿去。
但是现在不同了。自适应光学系统通过每时每刻地修正大气扰动所造成的图像畸变,使得星像还原,近乎可以达到衍射极限的完美程度。
自适应光学这一构想可以追溯到20世纪50年代,当时海尔天文台的胡瑞斯・拜勃库克(Horace Babcock)第一次提出了自适应光学的概念和工作原理。但是它超越了当时技术所能达到的极限。直到20世纪80年代后期,欧洲南方天文台在智利的腊希拉(La Silla)天文台的3.6米望远镜上安装了自适应光学系统的原型机。在那时,军方(主要是“战略防御倡议”,也就是俗称的“星球大战计划”)在秘密的情况下大力研发这项技术。冷战结束后,在1991年5月,美国军方对自适应光学的研究资料解密,全世界的天文学家都可以来获得这项具有革命意义的新技术。尽管还算不上常规武器,但是在过去的10年中近红外波段的自适应光学系统已成为了许多天文台的标准配置。而且天文学家已取得了共识,缺少了自适应光学系统的地基光学天文学将失去发展空间。双子星座天文台的弗朗柯伊斯・瑞冈特(Francois Rigaut)说,“没有自适应光学系统,建造新一代的巨型望远镜是毫无意义的。”
修复星光
那么,自适应光学系统是如何工作的呢?其基本原理相当简单的,就像数字电视有一个校正器,如果你知道大气是如何干扰星光的话,你就可以将其校正过来。换句话说,你每时每刻都必须测量并且修正大气所造成的星像扭曲效应。这一扭曲效应源自于湍流空气胞之间的微小温度差,这些空气胞的大小从几个厘米到几米不等。湍流空气胞会从不同的方向、不同的高度高速的经过望远镜的上空。每一个湍流空气胞就像是一个小透镜,会稍稍的改变光的路径。其典型的结果就是一个模糊而且一秒钟内颤动数百次的影像。
为了使光线重回正途,自适应光学系统必须作两件事:在每一个瞬间测量出所有的影像畸变,并且通过望远镜光路上的器件来校正这些畸变。在可见光波段,星像扭曲的角尺度以及变化率都大于或者高于在近红外波段的情况;这就是自适应光学系统都用在近红外波段的主要原因。
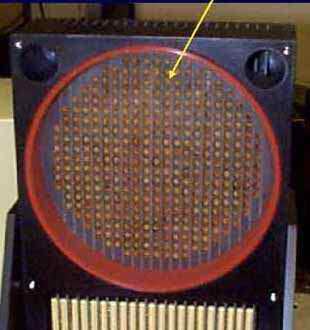
上文提到的用于校正星像的光学器件就是“弹性镜面”。在镜面的背面装有数十个甚至上百个压电晶体,使这面薄镜子可以形变成各种极为复杂的形状。这些晶体就是小触动器:由微小的电流驱动,它们可以伸缩几个微米。如果弹性镜面的形变能与大气扰动相匹配(更确切的说是反匹配),那么星像的畸变就会消失,就好像望远镜在外太空的观测效果一样。
黄色箭头所指的就是触动器,共有349个,间距7毫米
但是这说起来容易做起来难。大气的扰动必须实时的测量,而且每秒钟对触动器要计算并且施加上百次的电压。
第一步:确定波前
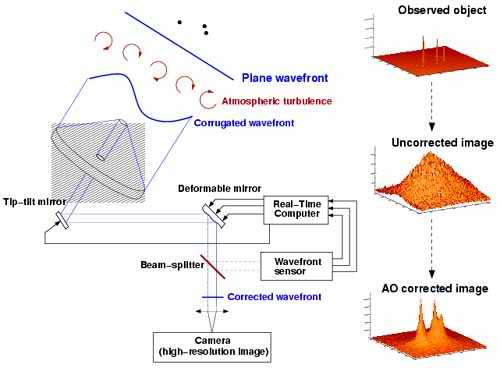
幸运的是,如果恒星足够亮,就能通过所要观测的恒星直接来测量星像的畸变。星光在穿过大气层之前可以认为其波前为平面,随着它穿过大气进入望远镜,它的波前就会受到扰动变得参差不齐。问题的关键是测量这一波前,并且将信息传送到弹性镜面上。
为了做到这一点,望远镜焦点附近的分束器会将一部分星光导入波前传感器。目前最广泛使用的波前传感器是沙克-哈特曼(Shack-Hartmann)传感器(以它的发明者命名),它由许多的小透镜组成,每一个透镜都有自己独立的图像探测器。如果一束光的波前是平面,那么经过透镜聚焦之后就会在图像探测器的中央成像。如果光束的波前有一些倾斜,那么其成的像就会偏离中央。测量这些像的位移,就能计算出波前的形状。
这些信息会送入高速计算机,它会计算这些数据,并且将结果传送到弹性镜面。弹性镜面位于波前传感器之前,形成一个紧凑的反馈回路;一旦弹性镜面形变成了正确的形状,传感器就会测量出平面波,说明校正成功――直到下一个毫秒。
听起来很容易。但是请等一下:如果被观测的天体足够亮,那这一套才能行得通。在波前传感器里,星光在穿过小透镜以及图像探测器时会被削弱。每个探测器在每秒钟要读出上百次。因此,除非恒星十分的亮(对于凯克望远镜的自适应光学系统来说,这一最低亮度为13等――仅仅相当于6英寸望远镜的目视极限星等),否则你会很快就探测不到光子了。
那么是不是自适应光学系统只能用于明亮的点状天体呢?如果使用一些小技巧,那就可以克服上述的问题。假设你现在想观测一个暗弱的星系。它实在太暗了,波前传感器探测不到它。但是在这个星系的旁边有一颗明亮的恒星,你就可以用它来作“引导星”。如果引导星距离星系只有几个角秒,它的光必然和星系的光一样,通过相同的空气胞。校正其中一个,就等于校正了另一个――望远镜的主检波器(通常是一个灵敏的红外相机或是摄谱仪)就能探测到这个星系极为清晰的像。
第二步:人造星
问题是天空中并没有足够的13等恒星。大多数有趣天体旁都缺少这样一颗明亮的恒星。天空中适用于自适应光学系统的部分――用自适应光学的术语来说,就是天空覆盖率――是非常小的,通常小于1%。在近红外波段,情况稍好一些,因为引导星可以离开被观测天体几十个角秒。然而大部分天空仍不适合于应用自适应光学系统。
解决这个问题的方法就像这个问题的提出一样的直截了当。如果没有引导星,那你就造一颗引导星。“你如果要观测天空中范围更大、更暗弱的部分,那么你就需要一颗激光引导星。”双子星座天文台的瑞冈特说。
激光引导自适应光学系统由罗伯特・福盖特(Robert Fugate)及其同事在20世纪80年代中发展起来。使用波长为589纳米的激光(钠的吸收和发射波长),望远镜的操作者可以使地球大气上层的钠元素发光。如果20瓦的激光能汇聚得足够紧的话,其结果就是在90公里高的富钠层中会出现一颗橙黄色的人造星。这束激光并不会干扰天文台的观测,因为它的波长限制在可见光波段,而大多数自适应光学系统都工作在红外波段。
但是现在事情更复杂了。首先,制造20瓦的专用激光器需要相当高的技术。瑞冈特说:“高性能、高质量的激光器仍旧十分的昂贵。”凯克天文台的阿克顿也对此表示同意。他说:“为了达到这一输出功率,你不得不把每样设备都发挥到极限。”例如,要输入5万瓦的电力才能得到需要的激光输出功率。将激光调整到钠的波长又是一项极具挑战性的工作。阿克顿说:“你必须承认,这是物理学的奇迹。”
其次,如此强的激光会使飞机驾驶员致盲,而且会损坏军用间谍卫星的探测器。天文学家在使用自适应光学系统的同时,也会启动红外相机,当飞机靠近的时候就会自动关闭激光系统。所有的观测计划,包括详细的时间表,都必须提交到北美航空航天防御司令部,它会向天文台提供一张时间表,在此时间段内天文台必须关闭激光系统,因为有卫星正飞临这一地区的上空。
最后也是最重要的,尽管激光引导星可以用来测量波前扭曲的曲率,但是它无法被用来测量影像所谓的颤动――从一侧到另一侧的大面积运动,这是一种全口径倾斜效应。这是由大尺度的空气胞影响激光束和星光所造成的,为了测量全口径倾斜,测量天然的引导星仍是必要的。幸运的是,这颗星可以很暗,因为它的光不比被波前传感器分成许多份。
所以,自适应光学系统不像看上去那样简单,它是许多复杂仪器的结合体。除了波前探测器、高速计算机和弹性镜面之外,你还需要一个强有力的激光器、探测飞机的热敏相机、一路直通北美航空航天防御司令部的热线电话以及一个独立的全口径倾斜校正回路。
尽管已发展了许多年,激光引导自适应光学系统仍处于试验阶段。除了军方的几套系统之外,只有两套自适应光学系统真正处于工作状态。其中一套是“天文学激光自适应光学系统”,安装在西班牙南部卡拉阿托(Calar Alto)天文台3.5米的望远镜上。另一套是由劳伦斯利乌莫(Lawrence Livermore)国家实验室研制,现安装在利克(Lick)天文台3米的沙因(Shane)反射望远镜上。两套系统都有自己曲折的研发过程。利克天文台的系统是首套用于天文观测的自适应光学系统。在凯克天文台,阿克顿和他的同事自行安装了他们自己的自适应光学系统。
第三步:曲率系统
夏威夷大学自适应光学小组的弗朗柯伊斯・罗迪亚(Francois Roddier)认为激光引导自适应光学系统终有一天会被认为是自适应光学系统中的恐龙,过于庞大、低效,而且注定会被弃用。“我希望不要再使用激光引导星了,”罗迪亚说。
他的方案是使用没有传统沙克-哈特曼传感器缺点的波前传感器。与让引导星的星光经过许多的透镜不同,“曲率传感器”使用整幅影像来测量波前的形状。具体的细节很难用三言两语讲清楚,但原理十分简单。在焦点的两侧,分别拍摄引导星的照片。做过经典的“恒星测试”的天文爱好者也许会猜到下一步将做什么。如果波前是一个完美的平面,那么两张照片的亮度分布应该是一样的。波前的任何变化都会造成亮度的变化。通过精确的比较这两张焦点外照片的图像,系统就可以修复被扭曲的波前。
“曲率系统的极限星等为15等或者16等,”罗迪亚说,“相应的就能覆盖10%的天区。”后续系统的极限星等将会进一步提高。并且,他补充道,曲率系统中的触动器要比传统系统要高效得多,因为弹性镜面的形状修正仅需要相对较少的触动器。原因是并不需要在大范围内进行曲率补偿,在小范围内即可。
在北双子星望远镜上成功应用了这一自适应光学系统,它被称为“霍库帕”(Hokupa'a,它在夏威夷语中是“极星”的意思),是由夏威夷大学天文研究所的罗迪亚小组所制造的曲率自适应光学系统的原型机。这套系统于1999年5月安装,仅使用了36个触动器。罗迪亚承认霍库帕的效果现在还不及凯克的自适应光学系统,但在2002年它的触动器个数就会升级到85个。“霍库帕-85将会和拥有几百个触动器的传统系统一样的出色,而且它要便宜得多,”他说。凯克Ⅱ上的沙克-哈特曼自适应光学系统使用了349个触动器。
在邻近的8.3米昴星团上,日本天文学家安装了有36个触动器的曲率自适应光学系统。按照昴星团望远镜仪器主任的话法,它将是双子星和凯克这两套系统的有力竞争者。2000年它进行了首次观测。在智利的帕洛奈尔(Paranal),欧南台除了正在安装中的196个触动器的沙克-哈特曼自适应光学系统外,还有一些曲率自适应光学系统正在筹划之中。
瑞冈特和他双子星天文台的同事布兰特・艾勒布洛克(Brent Ellerbroek)说,尽管霍库帕-85会被装在南双子星望远镜上,但是双子星座望远镜下一代的自适应光学系统(被称为“牛郎星”),仍将是传统的沙克-哈特曼自适应光学系统。“牛郎星”将由赫兹堡天体物理研究所研制,预计2002年间安装在莫纳亚克天文台上。“曲率系统有一些缺点,”瑞冈特说,“使它不适用于大型望远镜。”但是罗迪亚对此表示反对。“许多人都这样认为,”他说道,“我们会证明他们错了。”
第四步:大气三维结构学
如果天文学家打算建造20米或者更大的望远镜,那么引导星(激光的或是其他的)和弹性镜面都不能胜任。天文学家必须依靠一项革命性的技术,他被称为多重共轭自适应光学系统。
这项技术也被称为三维大气结构学。它与医疗诊断中的三维成像很相似。多重共轭自适应光学系统可以使天文学家建立一个光线所经过大气湍流的三维模型,而不再是二维的平面图像。
对于大望远镜来说,它已变得越来越重要,一个简单的例子就能证明这一点。假设有一架30米的望远镜,并且将其对准了一个星系。来自星系的光将穿过直径30米的圆柱形空气柱。然而,来自引导星的星光,仅仅位于90公里的高空,无法贯穿整个空气柱。相反,它仅能覆盖底面直径为30米的圆锥形区域,并且它位于圆锥的定点上。因此,圆柱里圆锥外的湍流空气就无法被测量,所以星系的像不会完全得到修正。多重共轭自适应光学系统通过使用多重引导星、波前传感器和弹性镜面,来解决这个问题。它同时也克服了自适应光学系统对视场大小的限制。杰库斯・贝克斯(国家光学天文台)第一个将这一技术称为“大气三维结构学”,尽管此前文献上已提过相应的设想。艾勒布洛克是近年来少数发展这一技术的人。和瑞冈特一起,他为双子星座望远镜设计了一套多重共轭自适应光学系统,将在四年内安装使用。他们将使用五颗激光引导星。“我们充满信心,”他说,“多重共轭自适应光学系统的基本部件与经典的激光自适应光学系统相同。因此,不存在硬件上的不确定性。”
那么,三维大气结构模型是如何工作的呢?由于光锥有不同的指向,大气湍流的高度可以由两个或更多个光锥用过视差法求出。五颗激光引导星就可以建立起望远镜上空的大气湍流三维模型。当然,这项技术也要求高速计算机,因为每秒钟要执行数百次的三维结构计算。
在艾勒布洛克和其同事设计的系统中有三块弹性镜面分别补偿不同高度的大气湍流所造成的影像畸变:一个靠近望远镜,一个大约4公里高,另一个位于8公里高处。调整这些高度的影像就能消除大部分的大气扰动。在技术术语中,对于特定的高度,这些弹性镜面是“光学共轭”的,因此得名多重共轭自适应光学系统。
计算机模拟显示,这项技术有着巨大的潜力。艾勒布洛克和瑞冈特说,多重共轭自适应光学系统将使双子星座望远镜在21世纪更具有竞争力。当然,一开始这些系统会用于红外波段,因为它较其他波段都来的容易。
“在10年里,下一代空间望远镜在可见光波段是无人能敌的,”艾勒布洛克说,涉及到6米的哈勃太空望远镜的后继者(刚从8米降到6米),“但是在红外波段,我们确信还是能够和它一较长短的。”
其他的小组也在研究多重共轭自适应光学系统。艾勒布洛克说,没有多重共轭自适应光学系统,建造下一代巨型地基望远镜是完全没有意义的。欧南台正在建造一台原型机,可能在双子星座的系统完成前完工。“他们的资金相对比较充裕,”瑞冈特说,“我们没有钱来建造一台原型机。”
钱将是关键。多重共轭自适应光学系统需要更多的波前传感器、弹性镜面、电子设备和计算机,相当于五个“传统”的激光引导自适应光学系统。但是,罗迪亚说,如果使用曲率自适应光学系统,激光器就可以不用了。“如果视场可以增加到几个角分,就会包含足够的天然引导星,这样曲率多重共轭自适应光学系统就可以工作,不需要激光引导星了。”
20年之后,尽管仍将是一项极具挑战的技术,但自适应光学将会日趋成熟。它将会成为许多大望远镜的常规技术。20年后,使用自适应光学系统的专业望远镜观测到木卫一上的火山将不再会是什么新鲜事了。
然而,对于即将到来的未来,每一项自适应光学所取得的成就都将新的起点。“有太多的东西等着我们去发现,”阿克顿说,“我们是幸运的,因为我们可以在这一个令人兴奋的岗位上工作。我感觉就像是第一个走入花园寻找复活节彩蛋的孩子。”
译自 《Sky & Telescope》
▲ BACK